|
Telecom Paris
Dep. Informatique & Réseaux  Nils Holzenberger
← Home pageApril 2026
Nils Holzenberger
← Home pageApril 2026 |

 Logic, Knowledge Representation and Probabilities
Logic, Knowledge Representation and Probabilities
| with | Samuel Reyd |

|
Contents
Symbolic Machine Learning
Reinforcement learning
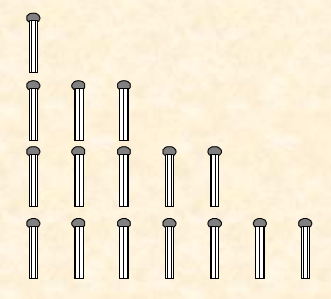
Observe that if you adopt the same behaviour twice, the machine tries to innovate to avoid making the same errors twice. If you are a perfect player (perfect players do exist in Nim games), then the machine will soon learn to be a match for you. You’ll probably lack the patience to teach it that far. When Jean-Louis was still a student (some time ago!), he implemented this game as one of his first programs (yes, computers did exist at that time!). His initial idea was to have the program learn against a random player. This was the time when ideas like ‘noise is a source of order’ (Edgar Morin, Henri Atlan...) were prevailing. The result proved miserable in that case. Random agents are too bad to learn from. After several days of intense thinking, a brilliant idea occurred to him (he has however noted that most students come upon the same idea instantaneously when he tells the story): let’s have the program play against itself!
|
Modify predicate learn(N) in marienb.pl to allow the program to play against itself. You may use the dynamic predicate silent that is already declared to avoid display and turn taking during the learning phase (just insert the goal assert(silent). when entering the learning phase and then retract it when the learning phase is over).
You should observe that if you let the computer play about 600 games against itself, then it becomes unbeatable. Paste your 'Learn' predicate in the box below. (paste your ‘Learn’ predicate only) |
The problem of symbolic induction
- neural networks, deep learning
- self-organizing maps
- reinforcement learning
- clustering techniques
- support vector machines
- Bayesian networks
- decision trees
- genetic algorithms
- ... ... ...
Human learning quite often does not rely on statistics. Human children learn some ten new words a day during ten years. The meaning of most of these words is understood and memorized after a single occurrence (we know it from the relatively rare cases in which children misunderstand a word). Even in adulthood, unique (but highly relevant) situations may be remembered for life.
Human learning, contrary to statistical learning, is sensitive to structure. In what follows, we concentrate on the problem of structure, as it may be the major challenge of future machine learning.Consider the two following instances of an unknown concept X (this example is borrowed from Ganascia, J-G. (1987). AGAPE: De l’appariement structurel à l’apprentissage. Intellectica, 2/3, 6-27).

E1 = square(A) & circle(B) & above(A, B)
E2 = triangle(C) & square(D) & above(C, D)Now you want to guess what X is. Some candidates are: ‘anything’, ‘any group of geometric shapes’, ‘any group of two geometric shapes’, ‘any group of two geometric shapes involving a square’, ... One would obviously reject definitions that, though covering both examples, are too general. ‘any group of two geometric shapes’ looks better than ‘any group of geometric shapes’ because it is less general and still matches the two examples. The rule of induction reads:
Abstract the least general generalization (lgg) from the examples
(we’ll see below how this rule can be improved). One can see here the crucial role played by structure in concept learning. Another crucial ingredient of generalization is the possibility of using some background knowledge, such as the shape hierarchy pictured here.The program lgg.pl aims at performing structural matching by looking for compatible features between two examples. Take a while to examine the program. Locate predicate matchTest at the end. It is used to test the program. It calls generalize, which calls match. Then match calls a predicate that you are supposed to write: lgg. When two features are not directly unifiable, lgg climbs up the shape hierarchy as necessary, until a match is eventually found. For instance, square(A) and triangle(B) cannot be unified at first, but a match is eventually found as both shapes satisfy polygon(_).Note that feature structures are "executed" once unified. This is supposed to mimic perception. The effect is to instanciate shapes to actuals objects (named object_1 and object_2).
|
Complete predicate lgg.
(Paste *only* ‘lgg’ and any other new clause it may use) Test your program by executing matchTest. Observe, among the different admissible matches, the one that has minimal cost. |
Inductive Logic Programming (ILP)
cute(X) :- dog(X), small(X), fluffy(X). (1)
cute(X) :- cat(X), fluffy(X). (2)To match these two examples, we must drop most of the features. We get:
cute(X) :- fluffy(X).which might be too general a conclusion. Can be use background knowledge to do better?
Consider the following knowledge:
pet(X) :- dog(X). (3)
pet(X) :- cat(X). (4)
small(X) :- cat(X). (5)When properly used, this knowledge may lead to the following generalization:
cute(X) :- pet(X), small(X), fluffy(X). (6)which is less general, and thus better, than the initial one. A technique known as inverse resolution does exactly that. First, observe that resolution of (6) with (3) gives (1):
(6) corresponds to the clause: [cute(X), ¬pet(X), ¬small(X), ¬fluffy(X)]
(3) corresponds to the clause: [pet(X), ¬dog(X)]
As we can see, resolution between (6) and (3) gives: [cute(X), ¬dog(X), ¬small(X), ¬fluffy(X)] which, indeed, corresponds to (1).Similarly, the resolution of (6) with (4) and then with (5) gives (2). The point of inverse resolution, as implemented in the programme Progol, is to get (6) from (1)+(3) and again from (2)+(4)+(5).Finding efficient implementations of inverse resolution that may scale up is ongoing research.
|
Try to apply inverse resolution to find the least general generalization of the two following examples:
E1: a ∧ b ∧ c E2: a ∧ d ∧ e ∧ fusing the following background knowledge: 1. d :- c. 2. d :- a, g. 3. f :- a, b. You may first generalize E1 using 1. Then generalize the new clause using 3, through an inverse resolution around b to make it closer to E2. And eventually keep what is common with E2. |
Explanation-Based Generalization (EBG)
In 1998, as Jean-Louis attended a conference in Göteborg, he was given the following object during the evening cheese & wine reception.


telephone(T) :- connected(T), partOf(T, D), dialingDevice(D), emitsSound(T).
connected(X) :- hasWire(X, W), attached(W, wall).
connected(X) :- feature(X, bluetooth).
connected(X) :- feature(X, wifi).
connected(X) :- partOf(X, A), antenna(A), hasProtocol(X, gsm).
dialingDevice(DD) :- rotaryDial(DD).
dialingDevice(DD) :- frequencyDial(DD).
dialingDevice(DD) :- touchScreen(DD), hasSoftware(DD, DS), dialingSoftware(DS).
emitsSound(P) :- hasHP(P).
emitsSound(P) :- feature(P, bluetooth).Now, an example is given through a list of particular features:
example(myphone, Features) :-
Features = [silver(myphone),
belongs(myphone, jld),
partOf(myphone, tc), touchScreen(tc),
partOf(myphone, a), antenna(a),
hasSoftware(tc, s1), game(s1),
hasSoftware(tc, s2), dialingSoftware(s2),
feature(myphone,wifi),
feature(myphone,bluetooth),
hasProtocol(myphone, gsm),
beautiful(myphone)].This particular object can be proven to be a telephone, using the above background knowledge. Some features, such as silver(myphone) turn out to be irrelevant to the proof.The program ebg.pl contains the background knowledge and the description of the example. It also includes a prover, prove, that prints what it does.
|
Add an argument Trace to prove in order to gather all the example’s features that are used in the proof (you may use swi-prolog’s append to build the trace).
You’ll get a set of relevant features such as: [feature(myphone, bluetooth), partOf(myphone, tc), touchScreen(tc), hasSoftware(tc, s2), dialingSoftware(s2), feature(myphone, bluetooth)] Observe that myphone is a telephone in several ways.(paste here only what you changed!) |
From the trace collected when proving telephone(myphone), we can define a new concept:
C001(X) :- feature(X, bluetooth), partOf(X, Y), touchScreen(Y), hasSoftware(Y, Z), dialingSoftware(Z).This definition has been obtained by generalizing shared constants within the trace. We may dig deeper into the structure of the trace and group together predicates that do not depend on X:
C002(Y) :- touchScreen(Y), hasSoftware(Y, Z), dialingSoftware(Z).Now, the definition of C001 reads:
C001(X) :- feature(X, bluetooth), partOf(X, Y), C002(Y).You can see how much can be learned from a single example (note that since the example leads to several alternative traces, even more can be learned). The new concepts are specializations of already known concepts, obtained through a generalization of particular objects (constants).This situation contrasts with statistical learning, as used in neural networks or in standard clustering techniques. Statistical learning works on "flat" structures (typically numerical feature vectors). It is unable to take advantage of background knowledge and to perform the kind of structural learning achieved through ILP or EBG. The converse is not true: ILP or EBG may be supplemented to take statistics into account.Though a combination of statistical and symbolic learning might represent the future of machine learning, several problems lie in the path leading to the autonomous learning machine Alan Turing dreamt of. The two main difficulties are the risk of combinatorial explosion that still limits the applicability of ILP, and the absence of predefined predicates in real life applications. For instance, in biological applications of machine learning, relevant structures that may explain protein chemical affinity are not known in advance.
| Please comment on the content of this lab session, and more generally on symbolic machine learning. |
Back to the main page